
معرفی اجزای مختلف ربات ها
مقدمه
رباتها به عنوان یکی از پیشرفتهترین دستاوردهای فناوری در دنیای مدرن، نقش بسیار مهمی در صنایع مختلف، از تولید و پزشکی گرفته تا خدمات و تحقیقات علمی، ایفا میکنند. هر ربات به عنوان یک سیستم پیچیده، از اجزا و مولفههای متعددی تشکیل شده است که هر کدام وظایف خاص خود را در عملکرد کلی ربات بر عهده دارند. در این مقاله، به معرفی و بررسی جزئیات اجزای مختلف رباتها پرداخته خواهد شد. این اجزا شامل بخشهای مکانیکی، الکترونیکی، نرمافزاری و حسگرها هستند که به طور هماهنگ با یکدیگر کار میکنند تا ربات بتواند وظایف مورد نظر را به درستی انجام دهد.
بخش مکانیکی
شاسی (Frame/Chassis)
شاسی یا بدنه ربات، ساختاری است که اجزای مختلف ربات روی آن نصب میشوند. این بخش معمولاً از مواد سبک و مقاوم مانند آلومینیوم، فولاد یا پلاستیکهای مهندسی ساخته میشود. شاسی ربات باید به گونهای طراحی شود که استحکام کافی برای نگهداری و حمایت از سایر اجزا را فراهم کند و در عین حال وزن ربات را به حداقل برساند.
ویژگیها: استحکام، سبکی، انعطافپذیری در طراحی.
کاربردها: رباتهای صنعتی، رباتهای متحرک، رباتهای خانگی.
مفصلها (Joints)
مفصلها اجزایی هستند که امکان حرکت قسمتهای مختلف ربات را فراهم میکنند. این مفصلها میتوانند به صورت چرخشی، خطی یا ترکیبی از این دو باشند. به عنوان مثال، در یک بازوی رباتیک، مفصلها به بازوها امکان میدهند تا در زوایای مختلف حرکت کنند.
انواع: مفصلهای دوار (Rotary), مفصلهای خطی (Linear).
کاربردها: رباتهای بازویی، رباتهای انساننما، رباتهای جراح.
محرکها (Actuators)
محرکها موتورهای ربات هستند که انرژی را به حرکت تبدیل میکنند. آنها نقش حیاتی در ایجاد حرکات مختلف ربات دارند. محرکها میتوانند الکتریکی، هیدرولیکی یا پنوماتیکی باشند، که هر کدام ویژگیها و کاربردهای خاص خود را دارند.
محرکهای الکتریکی: پرکاربردترین نوع محرکها که با استفاده از برق کار میکنند.
محرکهای هیدرولیکی: برای ایجاد نیروهای بزرگ، معمولاً در رباتهای صنعتی سنگین.
محرکهای پنوماتیکی: استفاده از هوای فشرده برای ایجاد حرکت، معمولاً در کاربردهایی که به حرکات سریع و تکراری نیاز دارند.
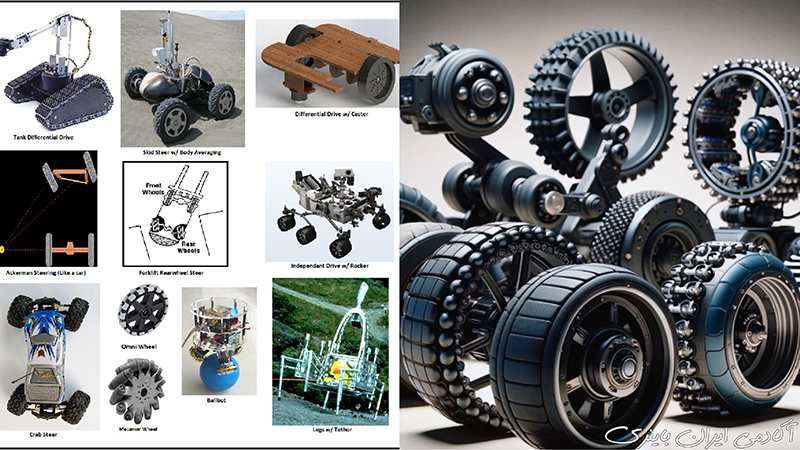
چرخها و تراکها (Wheels and Tracks)
چرخها و تراکها اجزایی هستند که به رباتهای متحرک امکان حرکت در محیطهای مختلف را میدهند. رباتهای چرخدار معمولاً برای حرکت در سطوح صاف و ثابت مناسب هستند، در حالی که رباتهای دارای تراکها میتوانند در محیطهای ناهموار و دشوار حرکت کنند.
چرخها: سادهترین نوع سیستم حرکتی، مناسب برای سطوح صاف.
تراکها: برای حرکت در محیطهای ناهموار، معمولاً در رباتهای نظامی یا اکتشافی.
بخش الکترونیکی
واحد کنترل (Control Unit)
واحد کنترل به عنوان مغز ربات، وظیفه مدیریت و هماهنگی تمامی بخشهای ربات را بر عهده دارد. این واحد معمولاً شامل یک یا چند پردازنده است که وظایف مختلفی مانند پردازش اطلاعات حسگرها، تصمیمگیری و ارسال فرمان به محرکها را انجام میدهند.
انواع: ریزپردازندهها (Microprocessors), میکروکنترلرها (Microcontrollers), FPGAها (Field-Programmable Gate Arrays).
کاربردها: کنترل حرکات ربات، پردازش دادهها، ارتباط با دیگر سیستمها.
منبع تغذیه (Power Supply)
منبع تغذیه، نیروی الکتریکی مورد نیاز برای عملکرد ربات را فراهم میکند. این منبع میتواند به شکل باتریهای قابل شارژ، منابع تغذیه خارجی یا حتی سیستمهای تولید انرژی مانند پنلهای خورشیدی باشد.
باتریهای لیتیوم-یون: پرکاربردترین نوع باتریها به دلیل وزن سبک و ظرفیت بالا.
منابع تغذیه خارجی: معمولاً در رباتهای صنعتی که نیاز به تغذیه پیوسته دارند.
پنلهای خورشیدی: برای رباتهایی که در محیطهای باز و با دسترسی محدود به برق کار میکنند.
مدارهای کنترل سرعت (Motor Drivers)
مدارهای کنترل سرعت، ولتاژ و جریان مورد نیاز برای محرکها را تنظیم میکنند تا سرعت و جهت حرکت آنها کنترل شود. این مدارها نقش کلیدی در عملکرد دقیق و کارآمد رباتها ایفا میکنند.
انواع: H-Bridgeها، مدارهای PWM (Pulse Width Modulation).
کاربردها: کنترل سرعت چرخها، بازوها، و دیگر اجزای متحرک ربات.
سنسورها (Sensors)
سنسورها اجزایی هستند که اطلاعات مربوط به محیط اطراف ربات یا وضعیت داخلی آن را جمعآوری میکنند و به واحد کنترل ارسال میکنند. این اطلاعات میتواند شامل دادههای مربوط به فاصله، سرعت، دما، نور، صدا و غیره باشد.
سنسورهای فاصله: مانند لیزری یا اولتراسونیک، برای اندازهگیری فاصله از موانع.
سنسورهای حرکتی: مانند ژیروسکوپها و شتابسنجها، برای تشخیص جهت و شتاب حرکت.
سنسورهای دما: برای مانیتورینگ دمای داخلی ربات یا محیط.
بخش نرمافزاری
سیستمعامل ربات (Robot Operating System)
سیستمعامل ربات یا ROS، یک مجموعه از نرمافزارهای منبعباز است که برای کنترل و هماهنگی اجزای مختلف ربات استفاده میشود. ROS به عنوان یک پلتفرم استاندارد، امکانات متعددی مانند ارتباط بین اجزای ربات، مدیریت دادهها و اجرای الگوریتمهای پیچیده را فراهم میکند.

ویژگیها: منبعباز بودن، پشتیبانی از انواع مختلف سختافزارها، پلتفرم استاندارد.
کاربردها: رباتهای صنعتی، رباتهای پژوهشی، رباتهای خدماتی.
الگوریتمهای هوش مصنوعی (Artificial Intelligence Algorithms)
الگوریتمهای هوش مصنوعی به رباتها امکان میدهند تا رفتارهای پیچیده و تصمیمگیریهای هوشمندانه را انجام دهند. این الگوریتمها میتوانند در زمینههای مختلفی مانند تشخیص اشیا، پردازش زبان طبیعی، برنامهریزی حرکت و یادگیری ماشین به کار گرفته شوند.
الگوریتمهای یادگیری ماشین: برای بهبود عملکرد ربات با استفاده از تجربههای گذشته.
الگوریتمهای تشخیص اشیا: برای شناسایی و تفکیک اشیا در محیط.
الگوریتمهای مسیریابی: برای پیدا کردن بهترین مسیر حرکت در یک محیط پیچیده.
برنامهریزی حرکت (Motion Planning)
برنامهریزی حرکت، فرآیندی است که طی آن ربات مسیر بهینه برای رسیدن به هدف را تعیین میکند. این برنامهریزی شامل تجزیه و تحلیل محیط، تشخیص موانع و ایجاد مسیرهایی است که ربات را به طور امن و کارآمد به هدف میرساند.
روشهای برنامهریزی حرکت: A*، RRT (Rapidly-exploring Random Tree)، الگوریتمهای مبتنی بر گراف.
کاربردها: رباتهای متحرک، رباتهای جراح، رباتهای خدماتی.
حسگرها و ابزارهای تعاملی
سنسورهای دیداری (Vision Sensors)
سنسورهای دیداری، شامل دوربینها و سیستمهای بینایی ماشین، به رباتها امکان میدهند تا محیط اطراف خود را ببینند و تحلیل کنند. این حسگرها برای تشخیص اشیا، شناسایی الگوها و انجام وظایف پیچیدهای مانند مسیریابی و تشخیص صورتها استفاده میشوند.
دوربینهای RGB: برای گرفتن تصاویر رنگی.
دوربینهای عمقسنج: برای اندازهگیری فاصله تا اشیا.
سیستمهای بینایی ماشین: ترکیب دوربینها و الگوریتمهای پردازش تصویر برای تشخیص و تحلیل.
سنسورهای لمسی (Tactile Sensors)
سنسورهای لمسی به رباتها امکان میدهند تا اطلاعاتی درباره تماس فیزیکی با اشیا را دریافت کنند. این سنسورها میتوانند فشار، دما، و ارتعاش را اندازهگیری کنند و برای وظایفی مانند گرفتن اشیا و تعامل با محیط به کار گرفته میشوند.
سنسورهای فشار: برای اندازهگیری نیروهای وارد شده بر سطوح.
سنسورهای دما: برای تشخیص تغییرات دما.
سنسورهای ارتعاش: برای تشخیص لرزشها و ارتعاشات.
سنسورهای صوتی (Audio Sensors)
سنسورهای صوتی، شامل میکروفونها و سیستمهای تشخیص صدا، به رباتها امکان میدهند تا صداها را شناسایی و تحلیل کنند. این حسگرها برای انجام وظایفی مانند تشخیص گفتار، تشخیص صداهای خاص و جهتیابی صوتی به کار میروند.
میکروفونها: برای ضبط و تشخیص صدا.
سیستمهای تشخیص گفتار: برای تحلیل و شناسایی گفتار انسان.
سیستمهای جهتیابی صوتی: برای تشخیص جهت و منبع صدا.
سیستمهای ارتباطی
ماژولهای ارتباطی بیسیم (Wireless Communication Modules)
ماژولهای ارتباطی بیسیم به رباتها امکان میدهند تا با دیگر دستگاهها و سیستمها ارتباط برقرار کنند. این ارتباط میتواند از طریق تکنولوژیهایی مانند Wi-Fi، Bluetooth، Zigbee و شبکههای سلولی انجام شود.
ماژولهای Wi-Fi: برای ارتباط در شبکههای محلی.
ماژولهای Bluetooth: برای ارتباط کوتاهبرد و کممصرف.
ماژولهای Zigbee: برای ارتباطهای سنسور شبکهای با مصرف پایین.
پروتکلهای ارتباطی (Communication Protocols)
پروتکلهای ارتباطی مجموعهای از قوانین و استانداردها هستند که برای تبادل دادهها بین اجزای مختلف ربات به کار میروند. این پروتکلها شامل CAN (Controller Area Network)، I2C، SPI و UART هستند.
پروتکل CAN: برای ارتباط بین واحدهای کنترل در رباتهای پیچیده.
پروتکل I2C: برای ارتباط بین سنسورها و واحد کنترل.
پروتکل SPI: برای انتقال دادههای سریع بین اجزا.
سیستمهای کنترل از راه دور (Remote Control Systems)
سیستمهای کنترل از راه دور به کاربر امکان میدهند تا از طریق یک دستگاه کنترل، ربات را از فاصله دور هدایت کند. این سیستمها معمولاً شامل یک کنترلر، گیرنده و سیستم ارتباطی هستند.
کنترلرهای دستی: مانند جویاستیکها و کنسولها.
سیستمهای کنترل از طریق اینترنت: برای هدایت رباتها از هر نقطهای از جهان.
سیستمهای کنترل خودکار: برای خودمختاری ربات در انجام وظایف مشخص.
بخشهای انرژی
باتریها (Batteries)
باتریها منبع اصلی انرژی برای اکثر رباتها هستند. آنها انرژی الکتریکی را فراهم میکنند که برای تغذیه مدارها، محرکها و سنسورها به کار میرود. باتریها بر اساس نوع شیمیایی و کاربردی که دارند، متنوع هستند.
باتریهای لیتیوم-یون: پرکاربردترین نوع باتری با وزن سبک و ظرفیت بالا.
باتریهای نیکل-کادمیم: برای کاربردهایی که به دوام بالا نیاز دارند.
باتریهای سرب-اسیدی: برای رباتهای صنعتی سنگین و کارهای نیازمند انرژی بالا.
سیستمهای مدیریت انرژی (Energy Management Systems)
سیستمهای مدیریت انرژی وظیفه کنترل و بهینهسازی مصرف انرژی در ربات را بر عهده دارند. این سیستمها میتوانند مصرف انرژی را در بخشهای مختلف ربات تنظیم کنند تا عمر باتری افزایش یابد و کارایی بهینه شود.
مدارهای شارژ و تخلیه: برای مدیریت شارژ و مصرف باتریها.
سیستمهای نظارت بر انرژی: برای مانیتورینگ و بهینهسازی مصرف انرژی.
مدارهای توزیع برق: برای توزیع مناسب انرژی به بخشهای مختلف ربات.
ابزارها و اتصالات
گیرهها و ابزارهای مکانیکی (Grippers and Mechanical Tools)
گیرهها و ابزارهای مکانیکی به رباتها امکان میدهند تا با اشیا فیزیکی تعامل کنند. این ابزارها معمولاً در انتهای بازوهای رباتیک نصب میشوند و برای گرفتن، جابهجایی، یا دستکاری اشیا به کار میروند.
گیرههای ساده: برای گرفتن و جابهجایی اشیا.
ابزارهای جوشکاری: برای رباتهای صنعتی در فرآیندهای تولید.
ابزارهای پیچگوشتی: برای رباتهایی که وظایف مونتاژ را انجام میدهند.
اتصالات و اتصالات حرکتی (Joints and Hinges)
اتصالات و اتصالات حرکتی اجزایی هستند که امکان حرکت بخشهای مختلف ربات نسبت به یکدیگر را فراهم میکنند. این اجزا میتوانند به صورت ساده یا پیچیده طراحی شوند، و معمولاً از موادی مانند فلزات سبک یا پلاستیکهای مقاوم ساخته میشوند.
مفصلهای چرخشی: برای حرکات دوار.
مفصلهای خطی: برای حرکات مستقیم و خطی.
اتصالات چندگانه: برای حرکات پیچیده و چند بعدی.
نتیجهگیری
رباتها به عنوان سیستمهای پیچیده و چندوجهی، از اجزای متعددی تشکیل شدهاند که هر کدام نقش خاصی در عملکرد کلی آنها ایفا میکنند. این اجزا شامل بخشهای مکانیکی، الکترونیکی، نرمافزاری، حسگرها و ابزارهای تعاملی هستند که به صورت هماهنگ با یکدیگر کار میکنند تا ربات بتواند وظایف مختلف خود را به طور موثر انجام دهد. آشنایی با این اجزا و نحوه عملکرد آنها برای هر کسی که علاقهمند به طراحی، ساخت یا استفاده از رباتها است، ضروری است. با توجه به پیشرفتهای سریع در حوزه رباتیک، انتظار میرود که این اجزا در آینده نیز به طور مداوم بهبود یابند و کاربردهای جدید و نوآورانهای در صنایع مختلف پیدا کنند.



نظرات (0)